1GEN
Sciences et Techniques Industrielles
Page 1 sur 4
Automatique et Informatiques Appliquées
Génie Énergétique – Premičre
Cours sur la régulation et les asservissements partie 1-prof
Pour maintenir une température constante, pour obtenir une pression constante d’ungaz dans une
enceinte, nous faisons appel ŕ
la régulation et ŕ l’asservissement
.
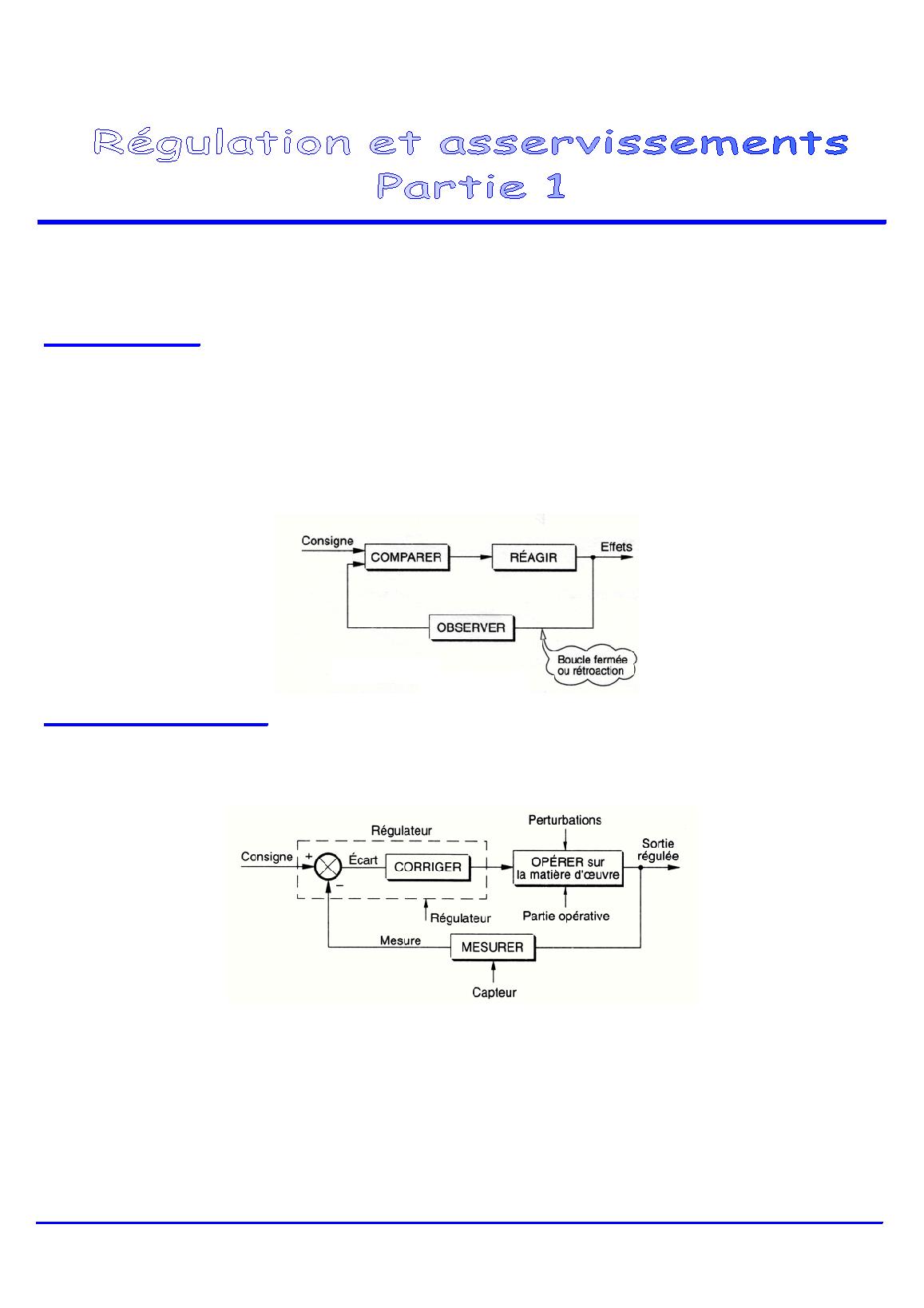
1 - PRINCIPE
Pour maintenir un niveau constant d’un liquide dans une cuve ayant un débit variable, un
opérateur doit OBSERVER le niveau de liquide, le COMPARER ŕ un repčre donné, c’est la
consigne, RÉAGIR en conséquence en ouvrant ou en fermant la vanne de remplissage de la
cuve.
La commande automatique de ce principe s’appelle
la régulation
. Le cycle OBSERVER (ou
MESURER), COMPARER et RÉAGIR est un
cycle ŕ boucle fermée ou ŕ rétroaction
.
2 - DÉFINITIONS
La régulation a une entrée de référence, ou consigne, généralement constante ou variant par
paliers, déterminée par un opérateur ou par exemple, un programme d’automate.
Schéma bloc d’un systčme régulé
L’asservissement a une entrée de référence qui suit une grandeur physique ; elle est donc
variable et indépendante directement des consignes de l’opérateur.